最近国家标准开放下载了,近40多类,上万项的国家标准公开了:我们扒一扒工控相关的标准有哪些,对于有些需要标准化的企业和个人提供参考。https://openstd.samr.gov.cn/
下载不揍:
Step01 : 先登录上述链接,找到搜索框:
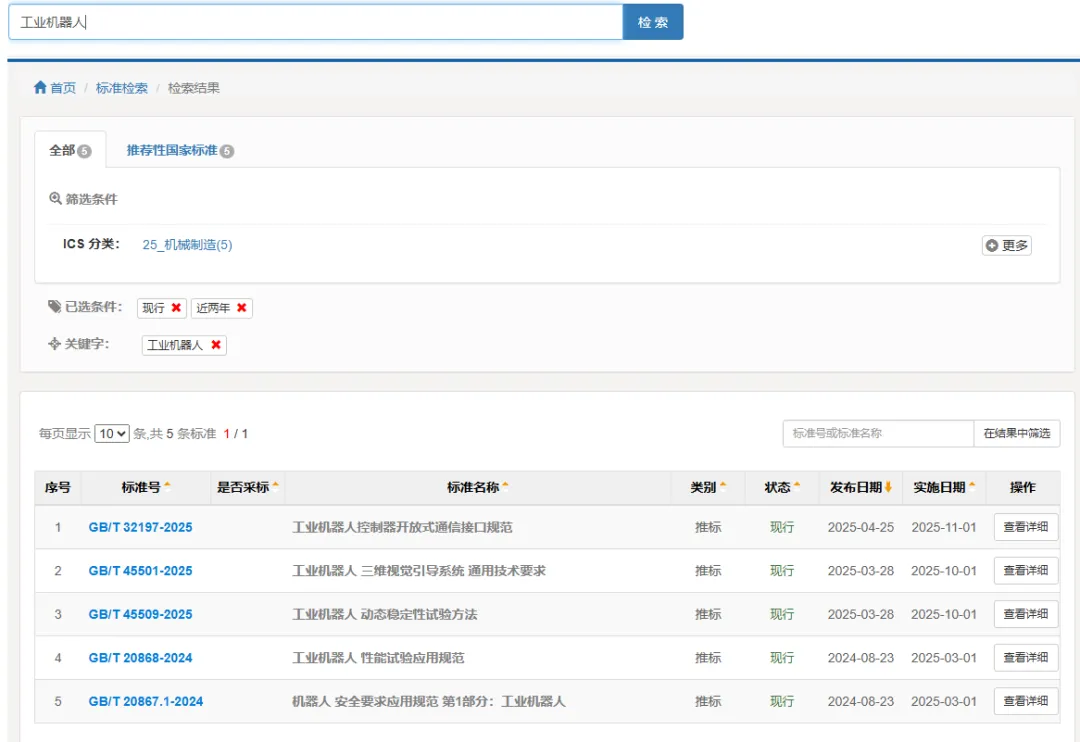
Step02:输入您要检索的内容,例如工业机器人:
可以筛选现行,近两年的标准,废除的不需要看。
Step03:找到您要下载的标准,点击查看详情或标准号进入:
进去后,就可以预览和下载了。点击对应的按钮即可。例如我们找到的《工业机器人控制器开放式通信接口标准》:
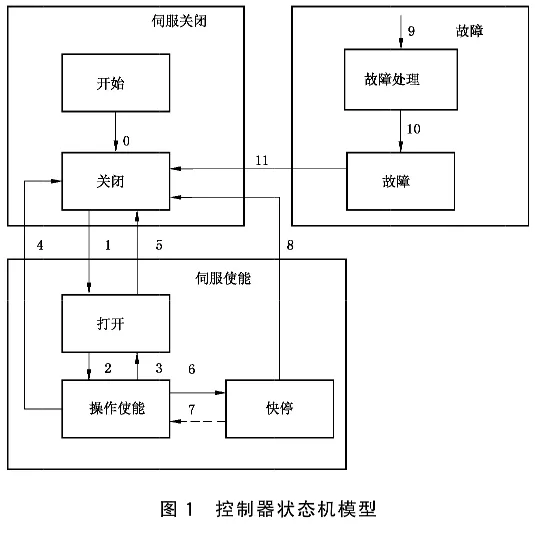
标准里面的内容还是可以给我们行业相关的研发、生产相关人员有指导性帮助的。例如下图1的机器人伺服的控制状态机,可以参考这类逻辑进行控制器的大体框架搭建:
状态转移说明:状态迁移 0:开始->关闭 事件:重置 动作:控制器自检或者初始化,开始通信。 状态迁移 1:关闭 -> 打开 事件:从主机收到“打开”指令。 动作:驱动器伺服加电,抱闸打开。 状态迁移 2:打开 -> 操作使能 事件:从主机收到“操作使能”指令。 动作:执行运动和 I/O 命令。 状态迁移 3:操作使能 -> 打开 事件:从主机收到“中止操作”指令。 动作:停止执行运动和 I/O 命令。 状态迁移 4:操作使能 -> 关闭 事件:从主机收到“关闭”指令。 动作:执行完当前运动和 I/O 命令,关闭伺服和抱闸。 状态迁移 5:打开 -> 关闭 事件:从主机收到“关闭”指令。 动作:关闭伺服和抱闸。 状态迁移 6:操作使能 -> 快停 事件:从主机收到“快停”指令。 动作:执行“快停”功能。 状态迁移 7:快停 -> 操作使能 事件:“快停”功能执行完毕。从主机收到“操作使能”指令。 动作:执行运动和 I/O 命令。 状态迁移 8:快停 -> 关闭 事件:“快停”功能执行完毕。从主机收到“关闭”指令。 动作:关闭伺服和抱闸。 状态迁移 9:所有状态 -> 故障处理 事件:控制器发生了内部错误。 动作:执行错误处理功能。 状态迁移 10:故障处理 -> 故障 事件:执行错误处理功能完毕,可以关闭伺服和抱闸。 动作:控制器停止执行运动和 I/O 命令。 状态迁移 11:故障 -> 关闭 事件:从主机收到“重置”指令。 动作:如果伺服和抱闸未被关闭,则关闭伺服和抱闸。
有兴趣的朋友可以自行尝试哦!如果对您有帮助,还请点赞、推荐和转发哦!








 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
